طراحی و ساخت ارابه تئویانسن

توسط دانشجوی گروه مهندسی مکانیک
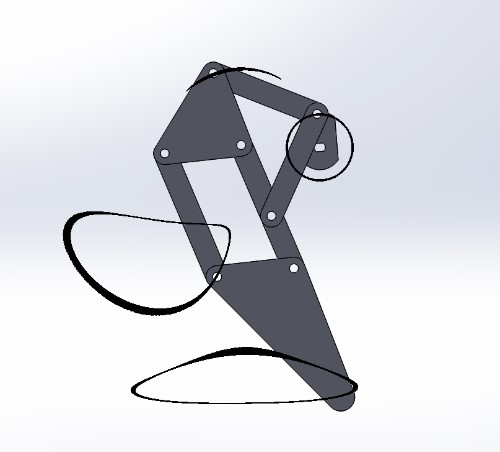
این ربات توسط آقای آرش آقاخانی در قالب پروژه پایانی کارشناسی رشته مهندسی مکانیک به راهنمایی جناب آقای دکتر مسیح لقمانی طراحی و ساخته شده است. مکانیزم حرکتی این ربات، یعنی مکانیزم تئویانسن یک مکانیزم ۸ میلهای مسطح با یک درجه آزادی میباشد که حرکت چرخشی میل لنگ را به حرکت خطی تبدیل می کند.

موفقیت این طرح به این دلیل است که مسیر پای انسان را هنگام قدم زدن در جهت جلو تقلید می کند. همچنین این کار را با حداقل گشتاور ورودی توسط میل لنگ و حداقل ارتعاش بدنه انجام می دهد. برای ساخت این ربات ابتدا لینک ها و فریم در نرم افزار سالیدورک مدلسازی شده سپس سرعت زاویهای لینک ها و سرعت خطی مفاصل به روش المان محدود در سالیدورک تحلیل شد که نتایج این تحلیل با مبانی دینامیک ماشین و فرمول های سینماتیکی اعتبارسنجی شدهاست.
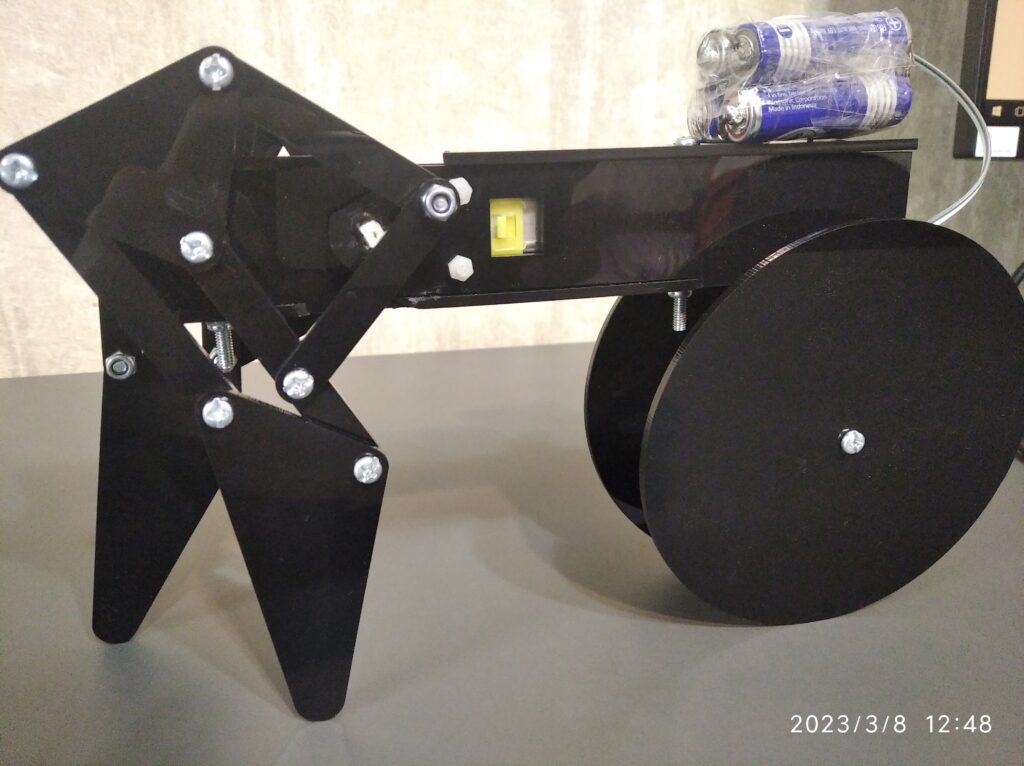
در نهایت برای ساخت لینک ها و بدنه، ورق پلکسی ۲/۸ میلیمتری برش لیزر داده شده و برای اتصالات لینک ها از مهره کاسه نمدی استفاده شدهاست. همچنین برای حرکت همزمان و یکسان هر دو پای ارابه از یک موتور گیربکس دو طرفه با سرعت زاویهای ۱۲۰ دور بر دقیقه و ولتاژ کاری ۳ تا ۶ ولت استفاده شدهاست.
